EVを「動く蓄電池」として生かすAI制御技術に関する論文がIEEE Accessに掲載されました(M2 林) A paper on AI control technology that leverages EVs as “mobile batteries” has been published in IEEE Access (M2 Hayashi)
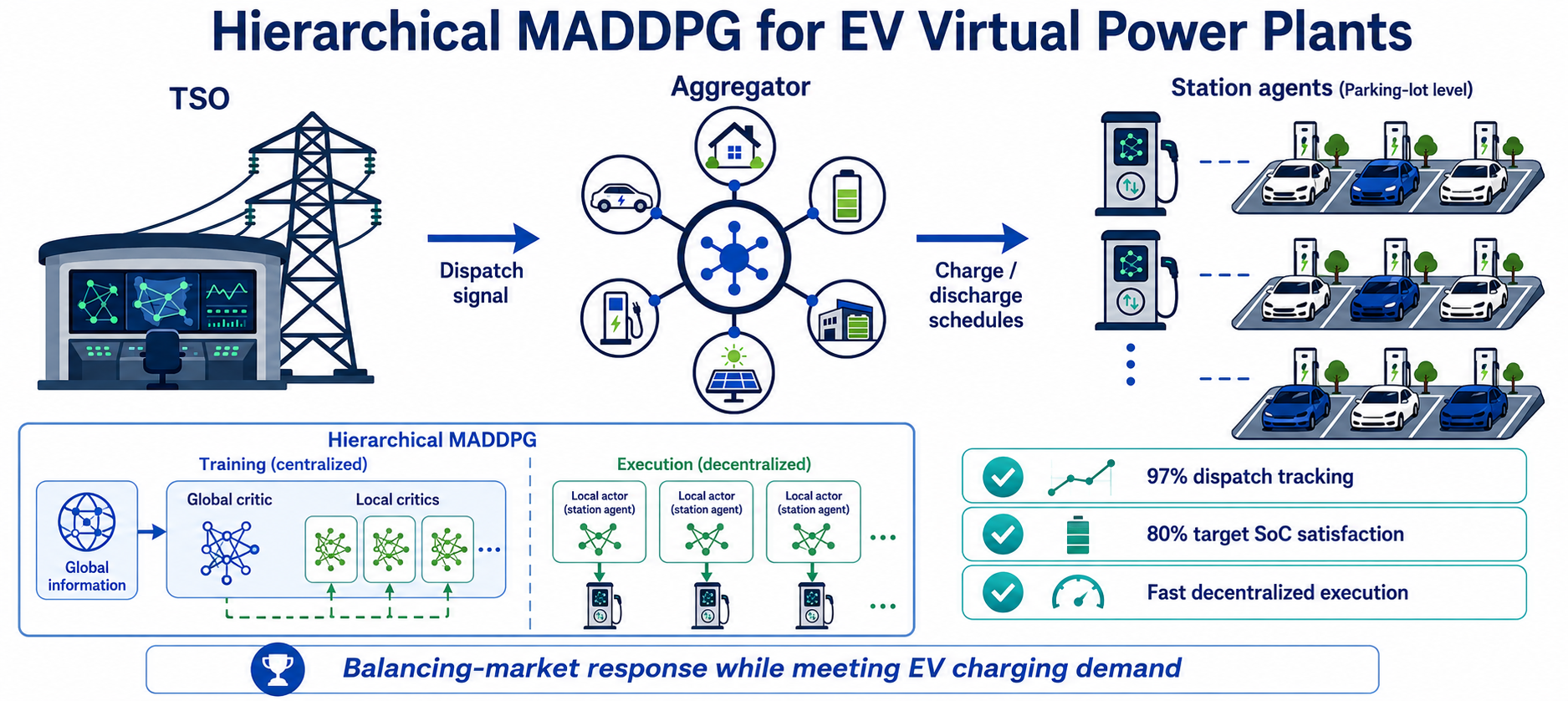
駐車場ごとのAIが協調してEVの充放電を制御し、電力系統からの指令への追従と利用者の充電要求の両立を目指す、EV仮想発電所の階層型制御のイメージ
EVを「動く蓄電池」として活かすAI制御技術に関する論文がIEEE Accessに掲載されました
筑波大学スマートグリッド研究室は、EVを電力システムの調整に活用するAI制御技術に関する論文をIEEE Accessに発表しました。再生可能エネルギーが増える時代に、電力系統の安定化と利用者の充電ニーズの両立を目指した研究です。
内容:
研究室では、再生可能エネルギーを必要な時に十分使える社会を目指し、電力とデータを結びつける研究を進めています。太陽光などは環境にやさしい一方、発電量が変わりやすく、需給バランスを保つ工夫が欠かせません。 その手段の一つが、駐車中のEVや小規模蓄電池をまとめて活用する方法です。ただし、1台あたりの効果は小さく、台数が増えるほど制御の手間や計算負荷を抑える必要があります。加えて、電力系統への協力と、利用者が出発までに十分充電できることを両立しなければなりません。
そこで本研究では、中央で一括制御するのではなく、各駐車場レベルにAIエージェントを置く階層型制御を採用しました。各エージェントが、その場所のEVの状態と上位からの指令を見ながら、充電するか放電するかを判断します。研究室からは2026年の電気学会全国大会でも、EV群の充放電自律制御に関する関連発表を行っています。 この研究はMADDPG(Multi-Agent Deep Deterministic Policy Gradient)というマルチエージェント強化学習を土台にしています。考え方は「全体を見て学び、現場で動く(centralized training / decentralized execution)」で、たとえるなら、練習ではチーム全体を見て連携を学び、本番では各選手が現場で素早く判断するイメージです。研究室でも、強化学習は高速な推論ができ、リアルタイム制御に向く技術として位置づけられています。
主な結果は以下の通りです
・EV全体で追従すべきシグナルとして与えられる、電力の調整指令への追従は97%でした。
・利用者が目標充電量に到達できた割合は80%で、改善の余地があります。
・各駐車場がその場で判断するため、中央で毎回大きな計算をする方式より速い分散実行が期待できます。実環境での検証拡大は今後の課題です。
EVは移動手段であるだけでなく、止まっている時間には電力システムを支える資源にもなります。本研究は、再生可能エネルギーの導入拡大、電力の安定供給、利用者の利便性を両立するための基盤技術として、将来のEV仮想発電所の実現につながることが期待されます。
執筆者である林さんのコメント:
初めての論文誌への投稿だったので大変なことも多かったですが、Sihuiさんと小平先生に助けていただきながら、無事に掲載を実現できてうれしく思います。今回の研究では、テーマの立案から問題設定、アルゴリズムの設計まで自分で考えながら進めた点が特に大変でした。また、シミュレーションだけでなく、実機を用いた検証にも一部取り組めたことは、自分にとって大きな経験になりました。一方で、結果にはまだ改善の余地があり、問題設定も簡略化されているため、実用化に向けてはまだ多くの課題があると感じています。今後も、より実用的なEV制御技術を目指して研究を続けていきたいです。
掲載情報
論文名:Hierarchical Multi-Agent Reinforcement Learning Control for Electric-Vehicle Virtual Power Plants in Balancing Markets
著者:林弘辰、Xue Sihui、小平大輔
掲載誌:IEEE Access
掲載年:2026
A conceptual diagram of the hierarchical control system for an EV virtual power plant, in which AI systems at each parking lot work together to manage EV charging and discharging, aiming to balance compliance with grid instructions and user charging demands
A paper on AI control technology that leverages EVs as “mobile batteries” has been published in IEEE Access
The Smart Grid Laboratory at the University of Tsukuba has published a paper in IEEE Access on AI control technology that utilizes EVs for power system regulation. This research aims to balance power grid stability with users’ charging needs in an era of increasing renewable energy.Contents:
Our laboratory is conducting research that integrates electricity and data, with the goal of creating a society where renewable energy is readily available when needed. While solar power and other renewable sources are environmentally friendly, their output fluctuates easily, making it essential to devise ways to maintain a balance between supply and demand.One such method involves collectively utilizing parked EVs and small-scale storage batteries. However, the impact per vehicle is small, so as the number of vehicles increases, we must minimize the effort required for control and the computational load. Furthermore, we must strike a balance between supporting the power grid and ensuring that users can fully charge their vehicles before departure.
Therefore, in this study, we adopted a hierarchical control system that places AI agents at each parking lot level rather than relying on centralized control. Each agent determines whether to charge or discharge by monitoring the status of the EVs at its location and following instructions from higher levels.
Our laboratory also presented related research on the autonomous control of EV charging and discharging at the 2026 National Conference of the Institute of Electrical Engineers of Japan.
< This research is based on MADDPG (Multi-Agent Deep Deterministic Policy Gradient), a multi-agent reinforcement learning method. The underlying philosophy is “learn by observing the whole system, then act locally (centralized training / decentralized execution).” To use an analogy, it is like a sports team learning coordination by observing the entire team during practice, while individual players make quick decisions on the field during actual games. Within our laboratory, reinforcement learning is recognized as a technology well-suited for real-time control due to its ability to perform high-speed inference.
The main results are as follows
・Compliance with power adjustment commands—which are issued as signals that the entire EV fleet must follow—was 97%.・The percentage of users who reached their target charge level was 80%, indicating room for improvement.
・Since each parking lot makes decisions on the spot, this approach is expected to enable faster, distributed processing compared to a system that performs large-scale calculations centrally each time. Expanding verification in real-world environments remains a challenge for the future.
EVs are not only a means of transportation but also serve as a resource to support the power grid while they are parked. This research is expected to pave the way for the realization of future EV virtual power plants as a foundational technology that balances the expansion of renewable energy, a stable power supply, and user convenience.
Comment from the author, Mr. Hayashi:
Since this was my first time submitting a paper to a journal, there were many challenges along the way, but thanks to the help of Sihui and Professor Kodaira, I am delighted that it was successfully published. In this research, the most challenging part was having to think through everything on my own—from formulating the theme and defining the problem to designing the algorithm. Additionally, the fact that I was able to conduct some verification using actual vehicles, in addition to simulations, was a valuable experience for me.On the other hand, I feel there is still room for improvement in the results, and since the problem definition has been simplified, I believe there are still many challenges to overcome before practical application. I intend to continue my research with the goal of developing more practical EV control technologies.Publication Information:
Title: Hierarchical Multi-Agent Reinforcement Learning Control for Electric-Vehicle Virtual Power Plants in Balancing MarketsAuthors: Koshin Hayashi, Sihui Xue, Daisuke Kodaira
Journal: IEEE Access
Year: 2026
DOI: 10.1109/ACCESS.2026.3698457